
The body interaction vibrator development board can be connected with additional sensors and actuators. In this post we show how to connect a servo motor. A servo motor can adjust its shaft to be positioned in varies angles. We use a inexpensive SG92R servo which can be positioned in any position between 0° and 180°.
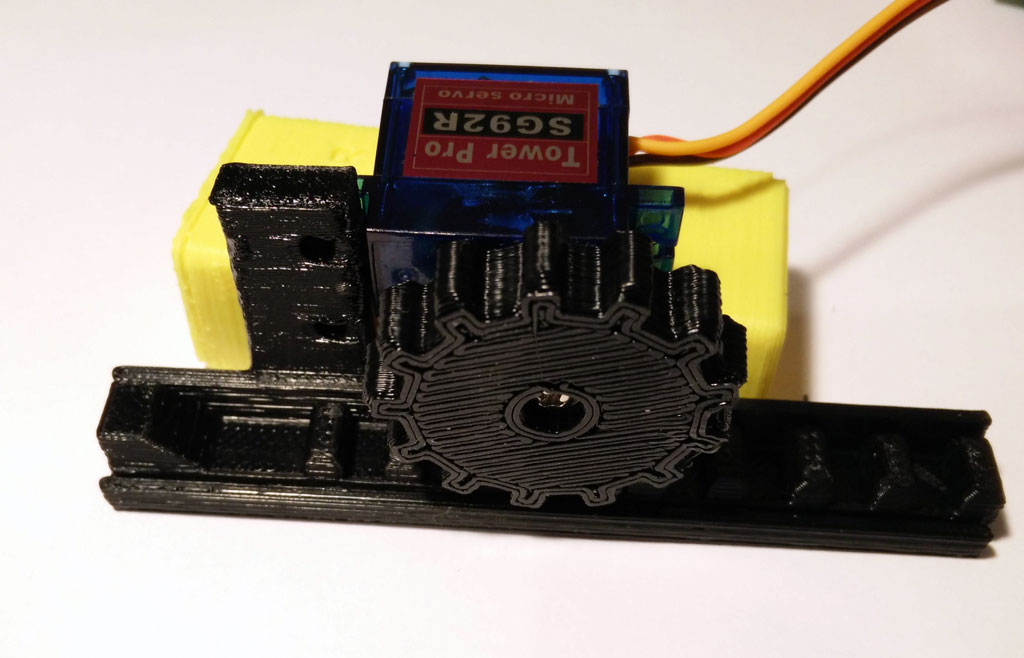 Now we can build eg. a linear actuator which could be useful for sex toys. If you have a 3d printer you can build your linear actuator and fix the servo motor. You can download the design here.
Now we can build eg. a linear actuator which could be useful for sex toys. If you have a 3d printer you can build your linear actuator and fix the servo motor. You can download the design here.

Connecting servo motor and body interaction vibrator development board
The servo motor has 3 wires: ground (-) (black or brown wire), power (+) (red wire) and control (yellow or orange).
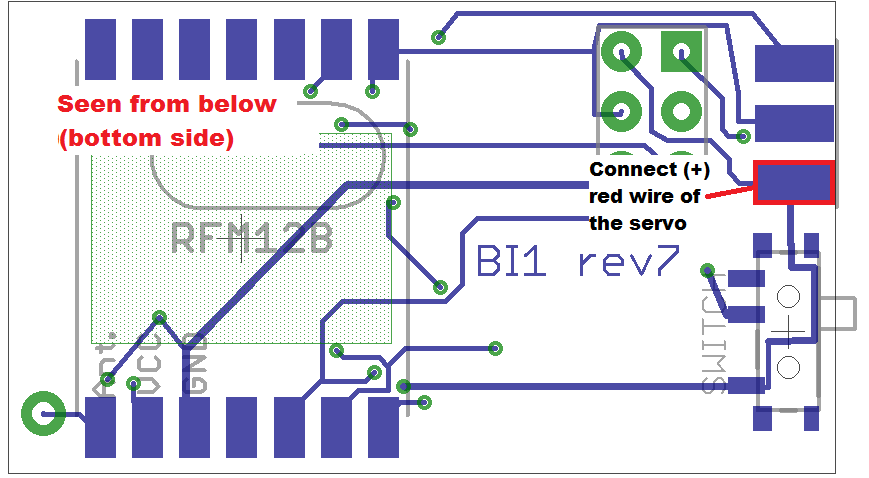
 Connect the (+) wire to the body interaction board. You can use the pad on the bottom side as shown on the image.
Connect the (+) wire to the body interaction board. You can use the pad on the bottom side as shown on the image.

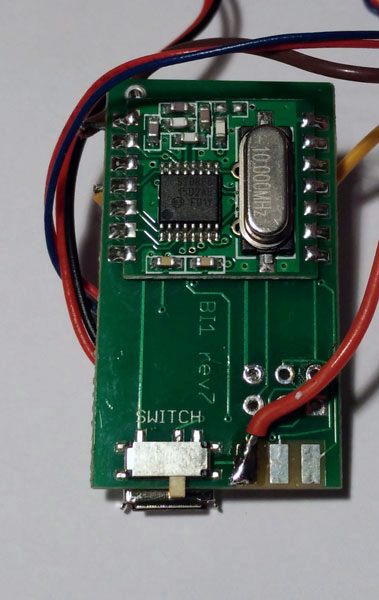
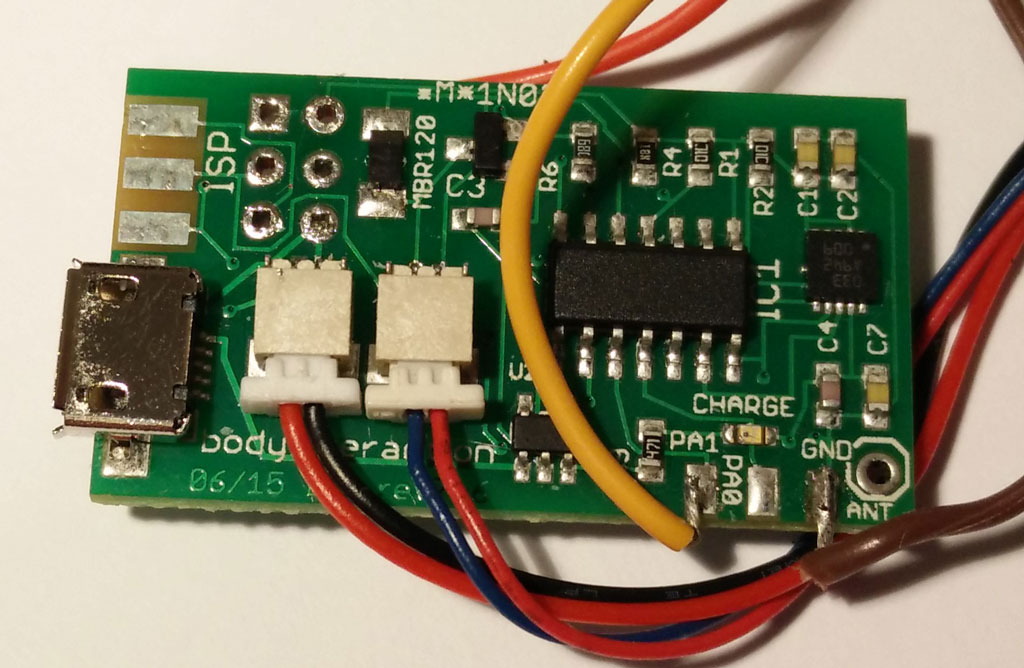 Then turn the board around to the top side. Now you can solder the black wire to the “GND” (ground) pad. Then solder the orange or yellow control wire to the leftmost pad “PA1”.
Then turn the board around to the top side. Now you can solder the black wire to the “GND” (ground) pad. Then solder the orange or yellow control wire to the leftmost pad “PA1”.
Programming the servo motor
The standard Arduino servo library will not work on the body interaction board. But you can use the TinyServo library. Download the library as *.zip file here or here and read the forum post.
Go into the Arduino library manager and include the ZIP file. Please restart Arduino.
The following script attaches the servo motor and shows how to control it.
// servo control with the body interaction development board using the TinyServo library
// -- adaption of the demo script by
// tylernt@gmail.com's ATTiny Hardware Timer Assisted Servo Library v1.0 20-Nov-13
// http://forum.arduino.cc/index.php?action=dlattach;topic=198337.0;attach=71790
#include <TinyServo.h>
const byte SERVOS = 1; // number of servos is 1
const byte servoPin[SERVOS] = { 7 }; // servo is connected to PA1 which is pin 7
#define SERVO 0 // our servo is given the name "SERVO"
void setup() {
setupServos();
}
void loop() {
delay(1000);
moveServo(SERVO, 180); // move servo to 180°
delay(1000);
moveServo(SERVO, 0); // move servo to 0
delay(1000);
for (int i = 0; i <= 180; i++) {
moveServo(SERVO, i); // move servo from 0° to 180° in 1° steps
delay(50);
}
moveServo(SERVO, 0); // move servo to 0°
delay(1000);
}

One thought on “Connecting a servo motor – move your vibrator”