
Since a few month, I own an Elegoo Mars Resin printer. It has UV LCD screen for “printing” each layer. In addition, I have an Elegoo Mercury Wash & Cure machine for a few weeks. These machines are incredibly affordable, they work and have a high resolution. The print space is rather small (120 (L) x 68 x 155 (H)…
Tag: Tinkercad
BI2 – building a silicone sex toy
Now let’s build the first ESP8266 vibrator. I use the reliable design from this blog post and the new BI2 board. The new BI2 board can be controlled from any smart phone or computer.
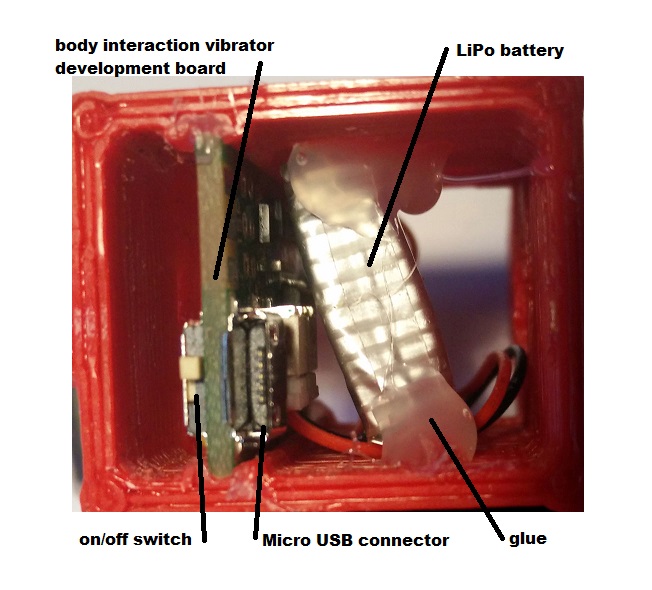
As the BI2 board is round there is no need to build a case for the PCB and the LiPo. The easist way is to glue the battery directly on the ESP8266. Connect the battery and one or more vibration motors with the BI2 board.

The form consists of two parts which are fastened together with tinker wire. Before you have to insert the board with the vibration motor(s) and the battery. Therefore I used a handle. The handle could be put on top of the form. Then fix a USB connector to the handle. Plug in the BI2 board. Fasten the second half of the form.
Very important: The USB micro connector on the board must be protected from the silicone. When silicone flow between USB plug and connector it will be impossible to pull out the plug. I use wax to seal the USB micro connector. Read more here.

Now pour in the silicone, wait for some hours. And open softely the form.




Remove the overhanging silicone.
Here ist the Link to Tinkercad where you can edit the form and download STL files for your 3D printer: Download from Tinkercad: form, handle. Download ready to print zipped STL files.
Now build YOUR personal sex toy. Here you find the code for the ESP8266 as well as an IOT server application for quantifying your sex and remote control.

Basic Node for the Internet of Sex Toys – part 2: 3d printed form, assembly, molding
 In this series of posts we describe how-to make a vibrating sex toy which is part of the Internet of Things.
In this series of posts we describe how-to make a vibrating sex toy which is part of the Internet of Things.
part 1: Basic Node for the Internet of Sex Toys
part 2: Molding the Basic Node
part 3: Software for the Basic Node
In part 2 we describe how-to make a mold form for the basic node. We need three forms:
- the mold form which consists of two parts
- the inlay which protects the electronics of the basic node
- a “hanging” for the inlay

We used Tinkercad to construct the parts. The molding form is based on Tinkercad’s banana form. You can edit and share them from your browser:
Inlay: https://tinkercad.com/things/h5fFOBqlmjw
Hanging: https://tinkercad.com/things/jUxc2oAamww
Form: https://tinkercad.com/things/6HS3XScOsCM
Instructions
Print out all forms. The STL files are available at Thingiverse. You might want to use XTC or similar for smoothing the inner part of the mold form.
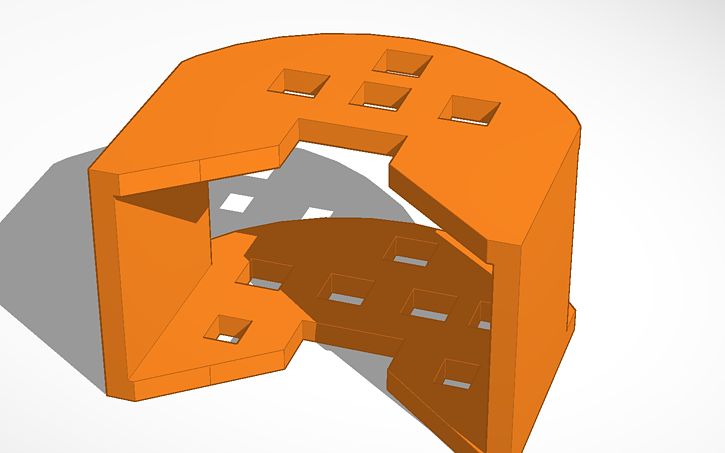
Assembling the Inlay
We use the inlay to protect the electronics.
 Simply put the electronics inside so that the upper body of the switch is on the same level as the upper inlay. We use hot glue to fix the basic node.
Simply put the electronics inside so that the upper body of the switch is on the same level as the upper inlay. We use hot glue to fix the basic node.
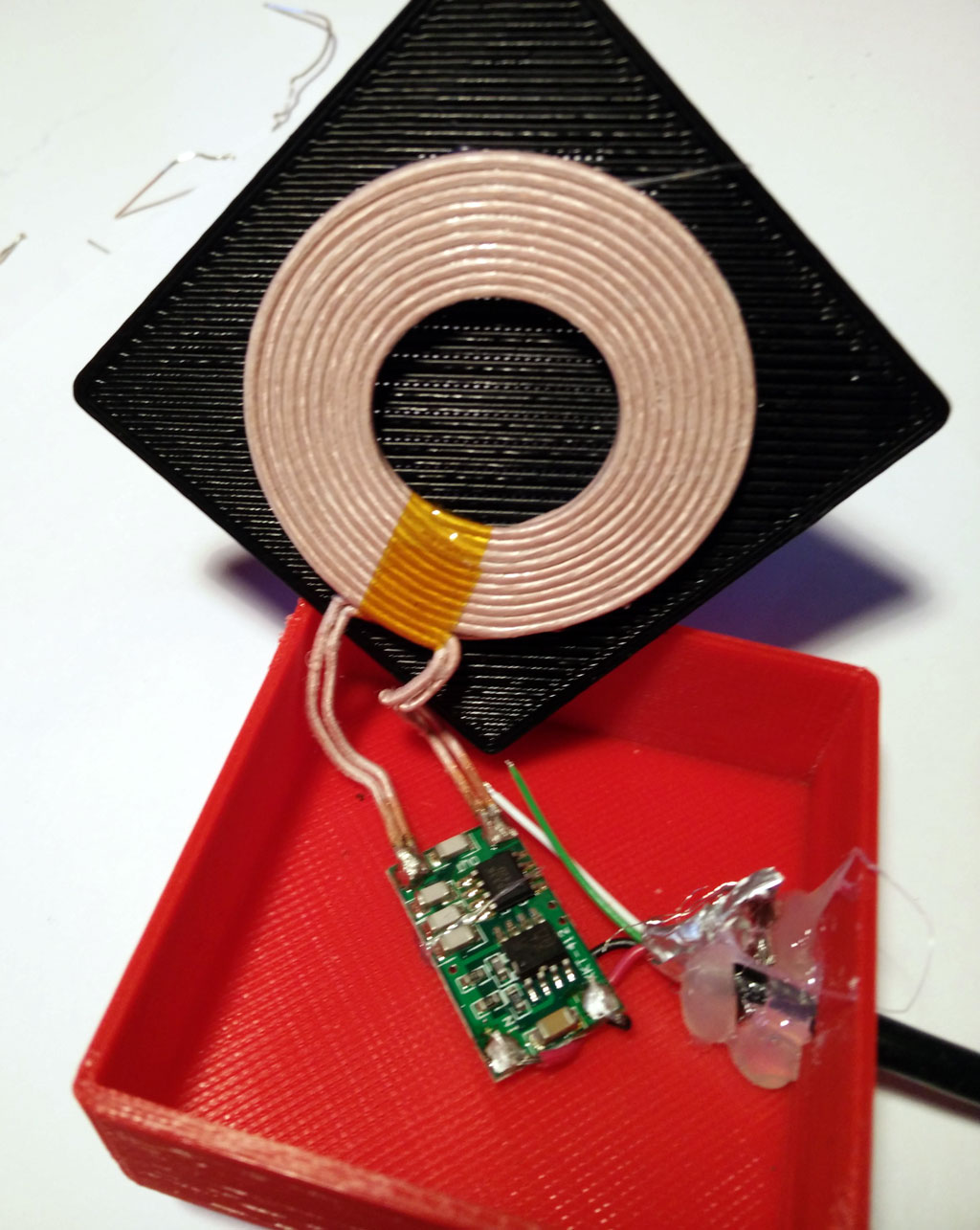
 Then fix the receiver coil of the wireless charging module on top of the inlay. The next step is to fix the hanging at the inlay.
Then fix the receiver coil of the wireless charging module on top of the inlay. The next step is to fix the hanging at the inlay.
 Now fix the LiPo battery on the bottom side of the inlay using hot glue or similar. Fix the wires. Finally you might fix the wires of the vibration motor next to the middle of the LiPo battery.
Now fix the LiPo battery on the bottom side of the inlay using hot glue or similar. Fix the wires. Finally you might fix the wires of the vibration motor next to the middle of the LiPo battery.
 Use tinkering wire to fix both parts of the molding form.
Use tinkering wire to fix both parts of the molding form.
 Put the inlay in the form. Fix the hanging with a tape or similar. The motors shouldn’t touch the inner part of the form.
Put the inlay in the form. Fix the hanging with a tape or similar. The motors shouldn’t touch the inner part of the form.
 Now prepare the silicone. We use Shore A 45 silicone (approx. 250 ml) from Silikonfabrik.de. It is hard but still a bit flexible. You may add color, too. You have about 10 minutes to stir the silicone and poor it in the form.
Now prepare the silicone. We use Shore A 45 silicone (approx. 250 ml) from Silikonfabrik.de. It is hard but still a bit flexible. You may add color, too. You have about 10 minutes to stir the silicone and poor it in the form.
After some hours you can remove the form. As you can see there is overhang which make removing the form very hard. The form could break when removing. Better preparation of the form (eg rasping) could improve the results.


If the blue LED of the Wemos board is still active you were successful.

Now you need a charging station. The construction is shown here. It is also possible to connect the sender (or transmitter) module with a 5V power source (eg. from the USB port). Just put the bottom of the molded basic node on the sender coil.
In the next part we introduce an updated version of the software including over the air update and WiFi management.
OpenSCAD as silicone molding form generator
 An alternative to 3d-printed sex toys are silicone toys. For making such a sex toy you need a molding form, where you pour in the silicone. If you use Tinkercad to build the form for the balls motive, you may need more than one hour. If you are not experienced in 3d constrcution it may take days. That’s ok and can be fun as you can realize your fantasies step by step.
An alternative to 3d-printed sex toys are silicone toys. For making such a sex toy you need a molding form, where you pour in the silicone. If you use Tinkercad to build the form for the balls motive, you may need more than one hour. If you are not experienced in 3d constrcution it may take days. That’s ok and can be fun as you can realize your fantasies step by step.
 But if you want to change a detail or want to resize some parts of it, it will take a long time as you have to unbuilt parts of the form, make changes and then reassemble. Sometimes building from scratch is faster.
But if you want to change a detail or want to resize some parts of it, it will take a long time as you have to unbuilt parts of the form, make changes and then reassemble. Sometimes building from scratch is faster.
In the last blog post we have introduced OpenSCAD to construct a sex toy form. Now we want to build a hull for the sex toy for overmolding.
The basic idea is very simple:
- Generate two forms. The smaller one has the size of the sex toy you want to make. The larger one will be the form where you pour in the silicone.
- Than use the OpenSCAD difference command which “subtracts” or cuts out the smaller form from the larger form.
But it is more complicated:
- You have to include a frame otherwise the form would fall over.
- You need two forms (A and b) so you could open the form after molding.
- Both forms must be fastened together when molding. Therefore you need holes for tinkering wire.
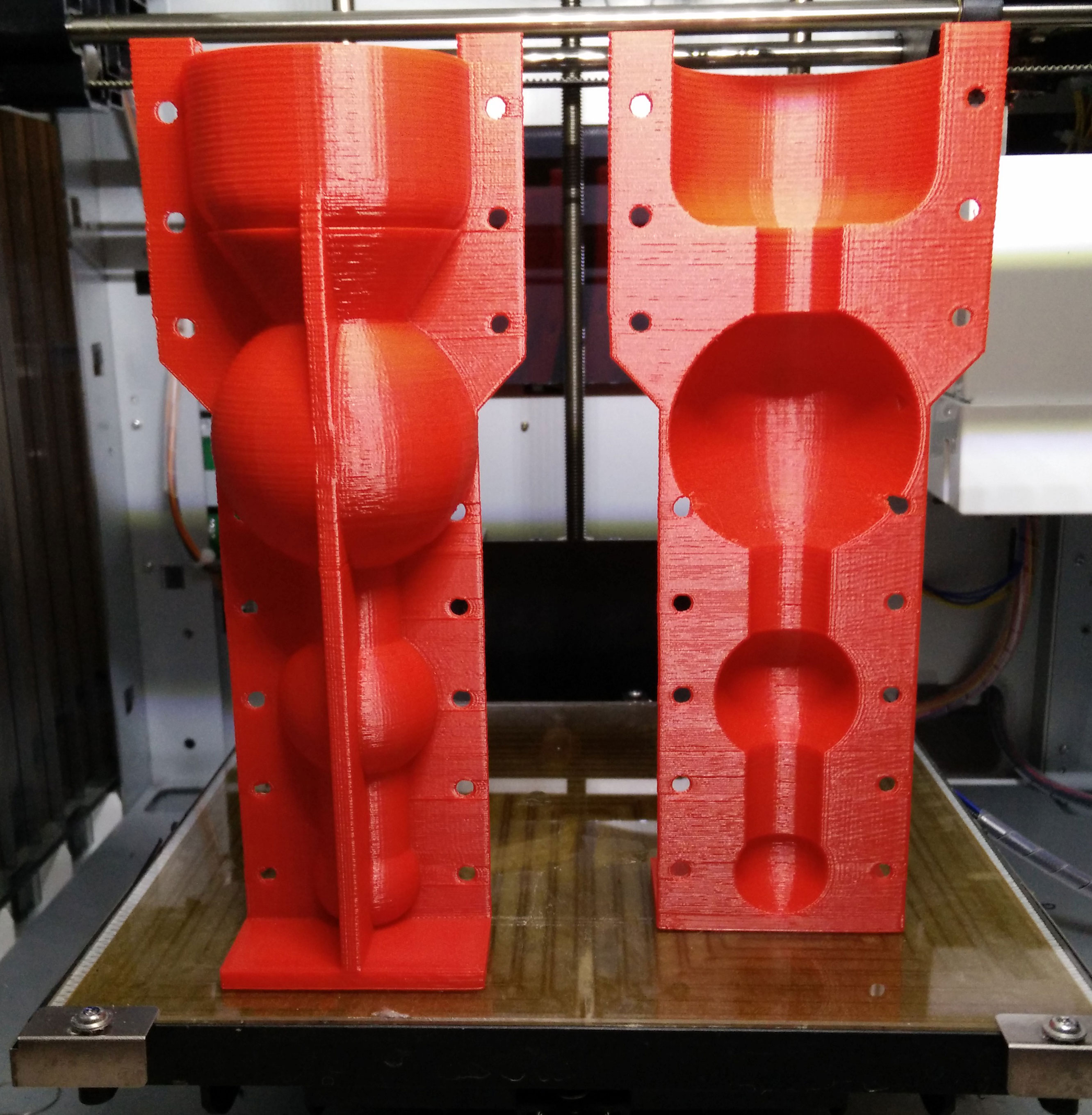
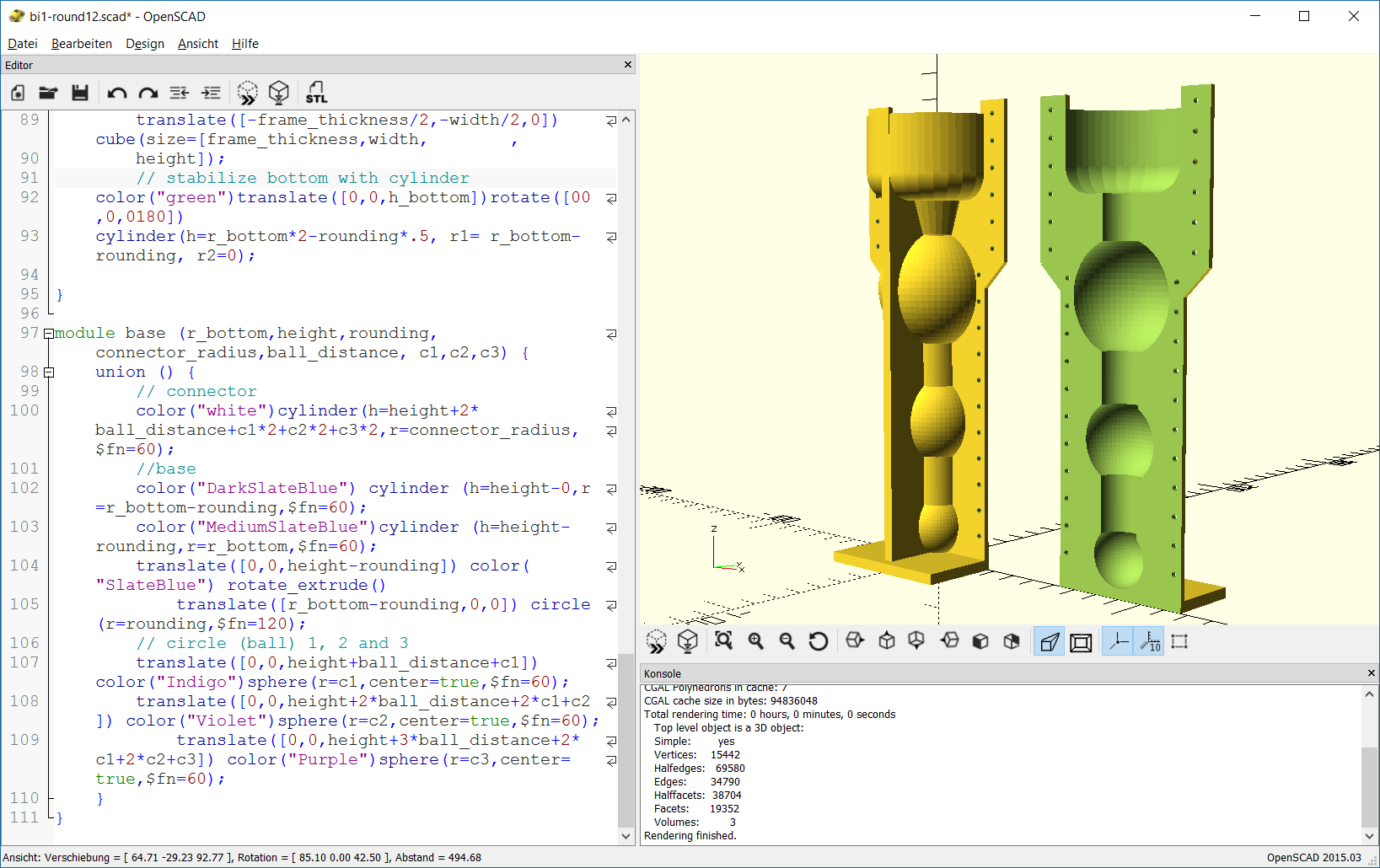 We have created a solution for molding form generation which is as flexible as our OpenSCAD sex toy generator. In addition you can change the thickness of the frame. Therefore you have to change the variable frame_thickness.
We have created a solution for molding form generation which is as flexible as our OpenSCAD sex toy generator. In addition you can change the thickness of the frame. Therefore you have to change the variable frame_thickness.
The SCAD script uses the module base which is already introduced. The generation of the frame is done in the module frame. The frame consists of a base plate and two supporting frames which stabilize the whole form. In addition there are extensions to the frame in the upper part of the form. These extensions will provide holes for fastening both forms.
The module complete_form constructs the form which is tricky. The union command is used to join the complete outer form and the frame. Now we have a filled form and have to remove the inner part. This is done by subtracting another complete form which is a bit smaller than the outer form. This is done with the difference command.
Another module hole provides all holes for the tinkering wire. At last we construct part A and part B of the molding form. Again the difference command is used to cut out one half of the form. This is done by subtracting a cube which is placed in the middle of the complete form. In addition the holes must be subtracted from the complete form.
 You can build in the body interaction vibrator development board to make a vibrating dildo, controlled by motion or by another body interaction vibrator development board. Read more here.
You can build in the body interaction vibrator development board to make a vibrating dildo, controlled by motion or by another body interaction vibrator development board. Read more here.
Try out with the Thingiverse customizer.
Download the zipped SCAD file here: bi1-round12
Or copy and paste the source code to the SCAD software:
// bodyinteraction toy form and mold form generator
// radius of bottom part
r_bottom=25; // [15:5:80]
// height of bottom part
h_bottom=30; // [10:5:80]
// top rounding of bottom part
rounding=10; // [10:5:20]
// radius of ball 1
r_ball1=21; // [15:5:50]
// radius of ball 2
r_ball2=15; // [15:5:50]
//radius of ball 3
r_ball3=11; // [15:5:50]
// radius of connecting cylinders
connector_radius=8; // [10:2:20]
// distance between balls and bottom part
ball_distance=15; // [10:2:40]
// offset (thickness of hull)
o=2;
// thickness of frame
frame_thickness=4;
height=h_bottom+3*ball_distance+r_ball1*2+r_ball2*2+r_ball3*2; echo(height);
// form part A
translate([0,0,height+frame_thickness])rotate([0,180,0])
difference() {
complete_form(r_bottom,h_bottom,rounding,r_ball1,r_ball2,r_ball3,connector_radius,ball_distance,o,frame_thickness,height);
union(){
translate([-r_bottom-o-10,0,-5])
color("red")cube([2*r_bottom+2*o+20,r_bottom+2*o,height+frame_thickness+5]);
holes(height,h_bottom);
}
}
//form part B
translate([90,0,height+frame_thickness])rotate([0,180,0])
difference() {
complete_form(r_bottom,h_bottom,rounding,r_ball1,r_ball2,r_ball3,connector_radius,ball_distance,o,frame_thickness,height);
union(){
translate([-r_bottom-o-10,-r_bottom-o-2-10,-5])
color("red")cube([2*r_bottom+2*o+20,r_bottom+2*o+10,height+frame_thickness+5]);
holes(height,h_bottom);
}
}
module holes (height,h_bottom){
for (i=[h_bottom+30:10:height])
translate([r_bottom-1,5,i])rotate([90,90,0])
color("green")cylinder(h=15,r=1,$fn=20);
for (i=[0:10:h_bottom+20])
translate([r_bottom-3+10,5,i])rotate([90,90,0])
color("blue")cylinder(h=15,r=1,$fn=20);
for (i=[h_bottom+30:10:height])
translate([-r_bottom+1,5,i])rotate([90,90,0])
color("green")cylinder(h=15,r=1,$fn=20);
for (i=[0:10:h_bottom+20])
translate([-r_bottom-6,5,i])rotate([90,90,0])
color("blue")cylinder(h=15,r=1,$fn=20);
}
module complete_form (r_bottom,h_bottom,rounding,r_ball1,r_ball2,r_ball3,connector_radius,ball_distance,o,frame_thickness,height) {
difference() {
union() {
base(r_bottom+o,h_bottom+o,rounding,connector_radius+o,ball_distance-2*o,r_ball1+o,r_ball2+o,r_ball3+o);
//complete frame
frame(2*r_bottom+2*o,o,height,frame_thickness,r_bottom,h_bottom,rounding);
};
base(r_bottom,h_bottom,rounding,connector_radius,ball_distance,r_ball1,r_ball2,r_ball3);
};
}
module frame(width,o,height,frame_thickness,r_bottom,h_bottom,rounding) {
//plate
translate([-width/2,-width/2-2*o,height]) cube(size=[width,width+2*o,frame_thickness]);
//frame1
translate([-width/2,-frame_thickness/2,0]) cube(size=[width,frame_thickness,height]);
//frame 1 extensions
translate([-width/2-010,-frame_thickness/2,-5]) color("blue")cube(size=[12,frame_thickness,60]);
translate([-width/2-10,-frame_thickness/2,55]) color("red")rotate([0,45,0]) cube(size=[12,frame_thickness,20]);
translate([+width/2-2,-frame_thickness/2,-5]) color("green")cube(size=[12,frame_thickness,60]);
translate([+width/2+01,-frame_thickness/2,47]) color("green")rotate([0,-45,0]) cube(size=[12,frame_thickness,20]);
//frame2
translate([-frame_thickness/2,-width/2,0]) cube(size=[frame_thickness,width, ,
height]);
// stabilize bottom with cylinder
color("green")translate([0,0,h_bottom])rotate([00,0,0180])
cylinder(h=r_bottom*2-rounding*.5, r1= r_bottom-rounding, r2=0);
}
module base (r_bottom,height,rounding,connector_radius,ball_distance, c1,c2,c3) {
union () {
// connector
color("white")cylinder(h=height+2*ball_distance+c1*2+c2*2+c3*2,r=connector_radius,$fn=60);
//base
color("DarkSlateBlue") cylinder (h=height-0,r=r_bottom-rounding,$fn=60);
color("MediumSlateBlue")cylinder (h=height-rounding,r=r_bottom,$fn=60);
translate([0,0,height-rounding]) color("SlateBlue") rotate_extrude()
translate([r_bottom-rounding,0,0]) circle(r=rounding,$fn=120);
// circle (ball) 1, 2 and 3
translate([0,0,height+ball_distance+c1]) color("Indigo")sphere(r=c1,center=true,$fn=60);
translate([0,0,height+2*ball_distance+2*c1+c2]) color("Violet")sphere(r=c2,center=true,$fn=60);
translate([0,0,height+3*ball_distance+2*c1+2*c2+c3]) color("Purple")sphere(r=c3,center=true,$fn=60);
}
}
Go to the first part of the SCAD tutorial
OpenSCAD as sex toy generator
 OpenSCAD is a free software tool for creating 3d objects. But it is different from other CAD tools like Tinkercad or Freecad. Instead of using the mouse to select and modify 3d objects you have to use a description language. Making a 3d object in OpenSCAD is a bit like programming. For creating a sphere you just have to type sphere(r=10); where r is the radius of the sphere. For creating a cube or a cylinder just type in the appropriate command. When done select compile from the menu and you’re object will be displayed.
OpenSCAD is a free software tool for creating 3d objects. But it is different from other CAD tools like Tinkercad or Freecad. Instead of using the mouse to select and modify 3d objects you have to use a description language. Making a 3d object in OpenSCAD is a bit like programming. For creating a sphere you just have to type sphere(r=10); where r is the radius of the sphere. For creating a cube or a cylinder just type in the appropriate command. When done select compile from the menu and you’re object will be displayed.
Just download the OpenSCAD software, install the tool and try out a command. You can copy and paste the dildo generator source code (at the end of this blog post) and try to change the parameters. Another option is to use the customizer module of the Thingiverse platform.
Brief Intro to OpenSCAD
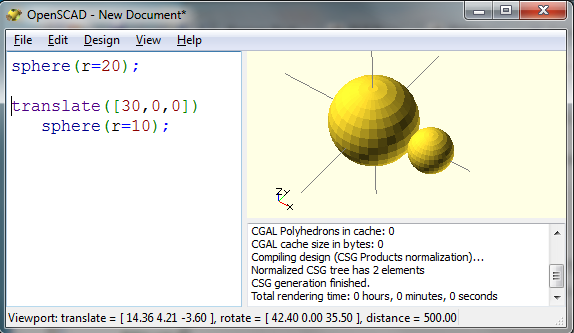 If you want to create a sphere not in the origin but somewhere else you have to shift the object using the translate command. For creating the second smaller sphere use
If you want to create a sphere not in the origin but somewhere else you have to shift the object using the translate command. For creating the second smaller sphere use
translate([30,0,0]) sphere(r=10);
The translate command moves the sphere objects on the x-axis by 30 points.
To visualize the form use the design menu and select “compile” or “compile and render”. Rendering takes some time (up to some minutes) but it will give you a correct preview of your form.
To build more complex objects you have to use the union or difference command. The union command puts simple objects together. With the difference command you can cut out something e.g. to make a ring. 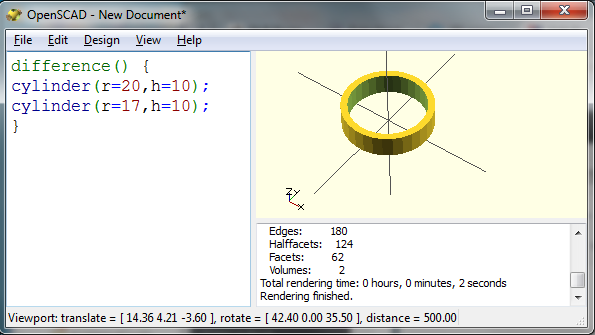 You can download a STL-file (select “export STL” from the menu) and print out the form with a 3d printer.
You can download a STL-file (select “export STL” from the menu) and print out the form with a 3d printer.
OpenScad can be used to create sex toys as shown by Mr O. He used OpenScad to create basic building blocks for sex toys which can be combined and changed in size. Moreover with OpenScad you can make generative designs. For example you can make a generative dildo which can be individualized by changing parameters like height, length etc.
Generative Dildo Project
Let us create the “balls” dildo which is introduced in Silicone overmolded vibrator – balls revisited and Update for “balls revisted” – silicone molded vibrator.
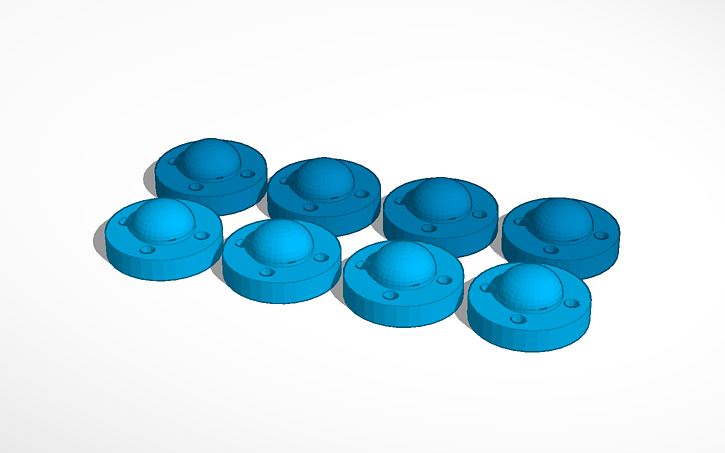
 The dildo consists of 6 forms:
The dildo consists of 6 forms:
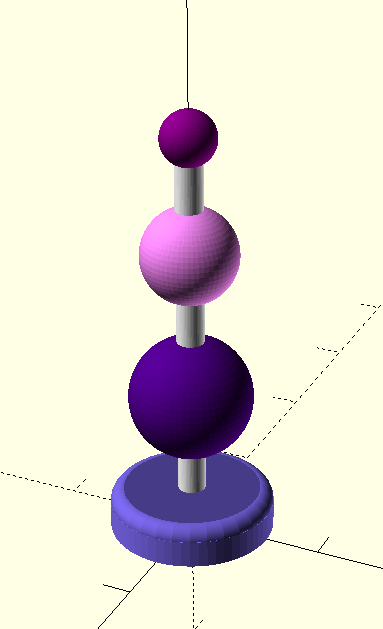
- three spheres with individual radius
- a base which is made of cylinders
- and an iterative use of circles to make the upper top of the base to be round
We use the module command to encapsulate the commands for creating the dildo. A module is very similar to functions or procedures in other programming languages, but they do not return a value. They just execute the commands in the module. The definition of the module starts with its parameters.
module base (r_bottom,height,rounding,connector_radius,ball_distance, c1,c2,c3) {
...commands for creating the dildo...
}
c1, c2 and c3 are the radius of the spheres. r_bottom is the radius of the base part and height the height if the base parts.
Now you can produce different versions of the ball motive by entering different parameters when you call the module base. With the following parameters the form at the left side will be generated:
base(50,60,10,10,30,15,25,35);
 This form will be made when using the following parameters:
This form will be made when using the following parameters:
base(60,30,10,10,30,20,35,45);
Make your own generative sex toy design and publish it
The Thingiverse platform is able to create objects made with OpenSCAD. Just upload the SCAD-file to Thingiverse using the customizer option. Now you can change the parameters within Thingiverse and generate a customized STL-file for 3d printing. Try it out with the Thingiverse customizer (as long as nobody complains…).
Download the SCAD file source code here: form_only
Or copy & paste the following SCAD code to generate the “balls” sex toy:
// bodyinteraction toy form
// radius of bottom part
r_bottom=50; // [50:5:80]
// height of bottom part
h_bottom=60; // [10:5:80]
// top rounding of bottom part
rounding=10; // [10:5:20]
// radius of ball 1
r_ball1=35; // [15:5:50]
// radius of ball 2
r_ball2=25; // [15:5:50]
//radius of ball 3
r_ball3=20; // [15:5:50]
// radius of connecting cylinders
connector_radius=10; // [10:2:20]
// distance between balls and bottom part
ball_distance=30; // [10:2:40]
base(r_bottom,h_bottom,rounding,connector_radius,ball_distance,r_ball1,r_ball2,r_ball3);
module base (r_bottom,height,rounding,connector_radius,ball_distance, c1,c2,c3) {
union () {
// connector
color("white")cylinder(h=height+2*ball_distance+c1*2+c2*2+c3*2,r=connector_radius,$fn=60);
//base
color("DarkSlateBlue") cylinder (h=height-0,r=r_bottom-rounding,$fn=60);
color("MediumSlateBlue")cylinder (h=height-rounding,r=r_bottom,$fn=60);
translate([0,0,height-rounding]) color("SlateBlue") rotate_extrude()
translate([r_bottom-rounding,0,0]) circle(r=rounding,$fn=120);
// circle (ball) 1, 2 and 3
translate([0,0,height+ball_distance+c1]) color("Indigo")sphere(r=c1,center=true,$fn=60);
translate([0,0,height+2*ball_distance+2*c1+c2]) color("Violet")sphere(r=c2,center=true,$fn=60);
translate([0,0,height+3*ball_distance+2*c1+2*c2+c3]) color("Purple")sphere(r=c3,center=true,$fn=60);
}
}
Moving dildo with motor driven skeleton
 So far we have used vibration motors for our sex toys. Vibration motors are cheap, powerful, easy to control and robust actuators. That’s why they are part of most sex toys. But what about moving or touching objects. Obviously we need some mechanics, maybe joints and gears? Or is there a simple option? A skeleton?
So far we have used vibration motors for our sex toys. Vibration motors are cheap, powerful, easy to control and robust actuators. That’s why they are part of most sex toys. But what about moving or touching objects. Obviously we need some mechanics, maybe joints and gears? Or is there a simple option? A skeleton?
I realized the idea for using some type of skeleton for moving a dildo when I saw the video of a naked Pleo – one of the best artificial life forms ever.

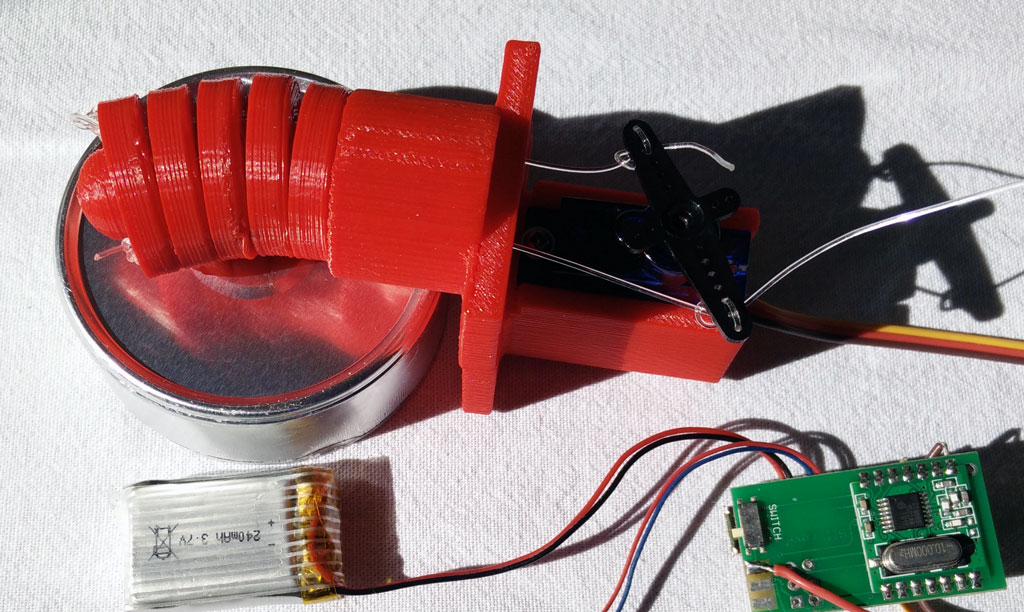
On www.thingiverse.com you will find more inspiration for using a skeleton to move something. The design is very simple.
The skeleton is composed of a number of vortexes. The holes are for connecting all vortexes and a servo with a nylon wire or similar.
In addition we need a handle where the vortexes are fastened to. There is also space for a servo. Then use a nylon wire to connect the vortexes with the servo. You can drive the servo with a Arduino development board or you use the body interaction development board as described here.

The servo should turn only 15-30 degree or so. If you use the body interaction development board please copy the following code and upload the code to the board.
#include <TinyServo.h>
// servo control with the body interaction development board using the TinyServo library
// -- adaption of the demo script by
// tylernt@gmail.com's ATTiny Hardware Timer Assisted Servo Library v1.0 20-Nov-13
// http://forum.arduino.cc/index.php?action=dlattach;topic=198337.0;attach=71790
const byte SERVOS = 1; // number of servos is 1
const byte servoPin[SERVOS] = { 7 }; // servo is connected to PA1 which is pin 7
#define SERVO 0 // our servo is given the name &quot;SERVO&quot;
void setup() {
setupServos();
}
void loop() {
moveServo(SERVO, 0); // move servo to 0°
delay(1000);
moveServo(SERVO, 30); // move servo to 30°
delay(2000);
}
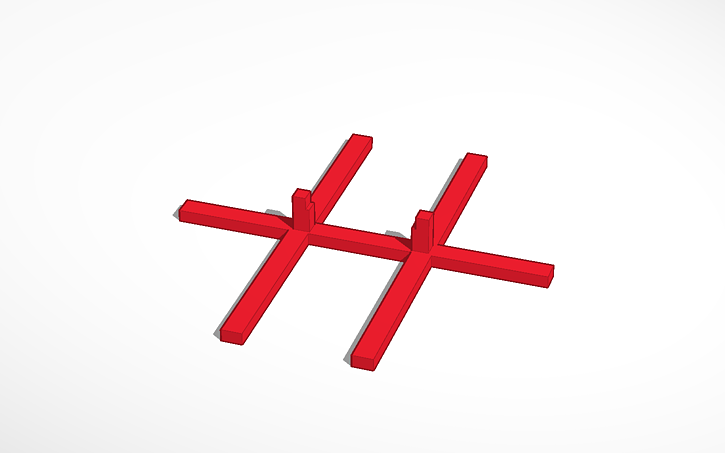
In addition we need a wrapping for the skeleton. This can be made using these two forms (download STL files).
Use flexible silicone and poor it in the form. The thickness of the wrapping is a bit too large – it rather hinders the skeleton in its movements. But it works!

Now we can put everything together.
Download on Thingiverse: http://www.thingiverse.com/thing:1736282
Tinker with Tinkercad!
Form: https://tinkercad.com/things/e8yscABu9Al
Skeleton: https://tinkercad.com/things/dfbMQsE4Mtl
Servo handle: https://tinkercad.com/things/5EHHrqM5sqC
YouTube: https://youtu.be/F1b8bGbuSHw
New vibrator design “fusion”
 bodyinteraction designed a lot of vibrating toys, some are usable as massage devices, some are explicit sex toys (vibrator ring, balls), some are experimental (collar). Everyone is motion controlled. If you have more than one they will influence each other remotely, eg. a vibrator and a vibrator ring.
bodyinteraction designed a lot of vibrating toys, some are usable as massage devices, some are explicit sex toys (vibrator ring, balls), some are experimental (collar). Everyone is motion controlled. If you have more than one they will influence each other remotely, eg. a vibrator and a vibrator ring.

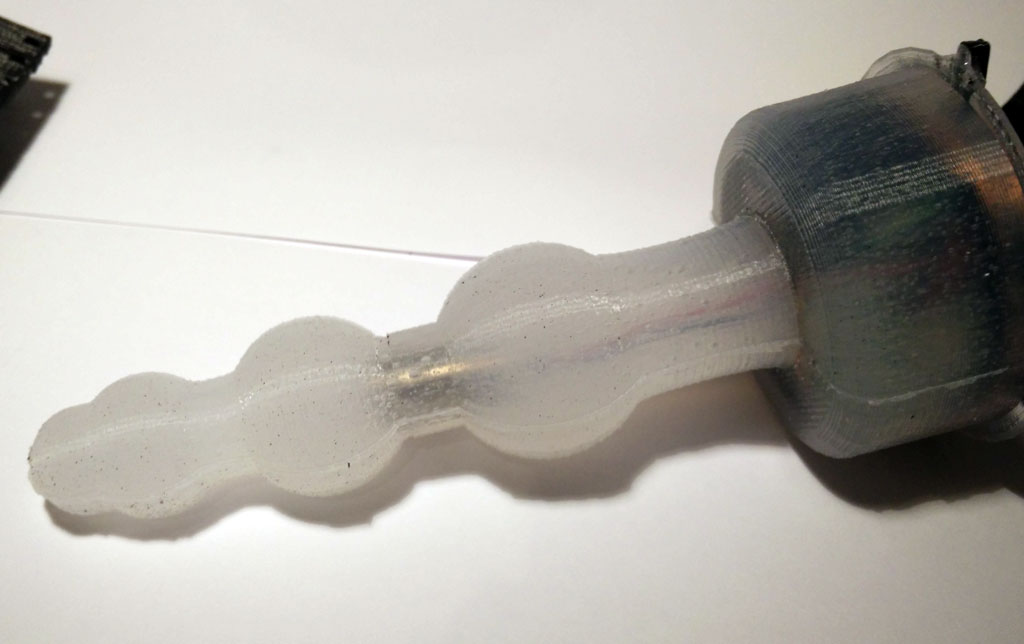
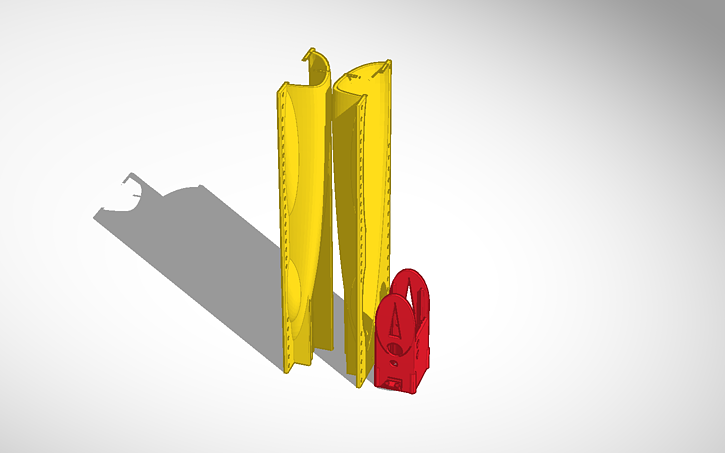
But a device like a classic big vibrator is still missing. So we designed the “fusion” which is approx 19cm long and up to 4+cm in diameter. It is called fusion as the case is made of silicone and 3d printed material (ABS).

We have put the body interaction vibrator development board, motor and battery in a silicone form. There is an on/off switch – so when you travel the vibrator doesn’t wake up when it is moved. And you can charge the battery with a USB micro connector. There is a spacious inlay for the electronics, so it will be easy to get it done.
Pros:
- easy to charge the battery via USB
- on/off switch
- hard handle
- flexible upper part
- large (if you like this)
- ISP interface (“hacker port”) accessible
Cons:
- only the silicone part of the form can be put under water for cleaning
What do you need?
- 200 ml silicone with high shore A rate, eg. shore A 45 from silikonfabrik.de
- optional: special colour for silicone molding
- 3d print of the molding form, inlay and closure
- tinker wire
- body interaction vibrator development board with LiPo and motor (or similar Arduino boards)
- bin for preparing the silicone, something to stir the silicone
How much is it?
- Board, battery, motor: 30$ (buy at Tindie)
- Silicone: 10$
- 3d Prints: less than 5$
Step by step instructions
Step 1: Print out the inlay, the form and the enclosure
Download as zip-file: Fusion
Download at Thingiverse: http://www.thingiverse.com/thing:1505539
Step 2: Prepare the inlay: Insert the body interaction board and the LiPo battery
The body interaction vibrator development board is inserted into the provided rails. It it doesn’t fit in use a file to remove printing artefacts. Use some glue to fix the board. Then insert the battery and fix it.
Important: The Micro USB connector must be above the upper part of the inlay.
Step 3: fix the wires of the vibration motor
The vibration motor will hang down from the inlay as the inlay will be put in the form upside down. You can influence the position of the motor by shortening the wire or fixing the wire to e.g. to the battery. In this case the wire of the motor was threaded between battery and board. Therefore the motor will be in the middle of the vibrator.

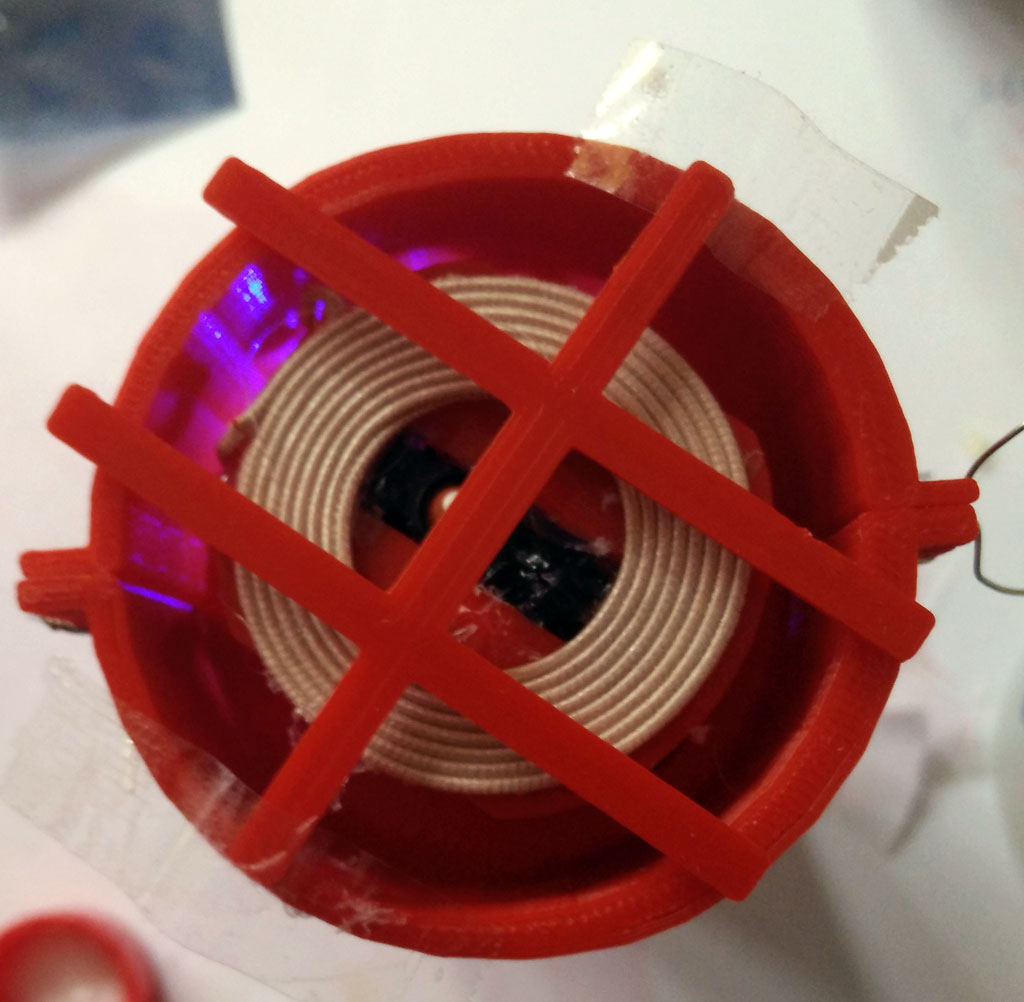
 in the center there is the overmolded vibration motor
in the center there is the overmolded vibration motor
Step 5: Prepare the form
Use some tinker wire to “press” both parts of the form tight together. Use some wax to fix little holes in the form where the printer failed. (These are the white spots)
Use some wax to fix little holes in the form where the printer failed. (These are the white spots)

Step 6: Insert inlay into the form
There must be some space between inlay and form for the silicone.
Remark: The two wedge like forms at both sides of the inlay help to hold the inlay. The wedge can be removed after molding.
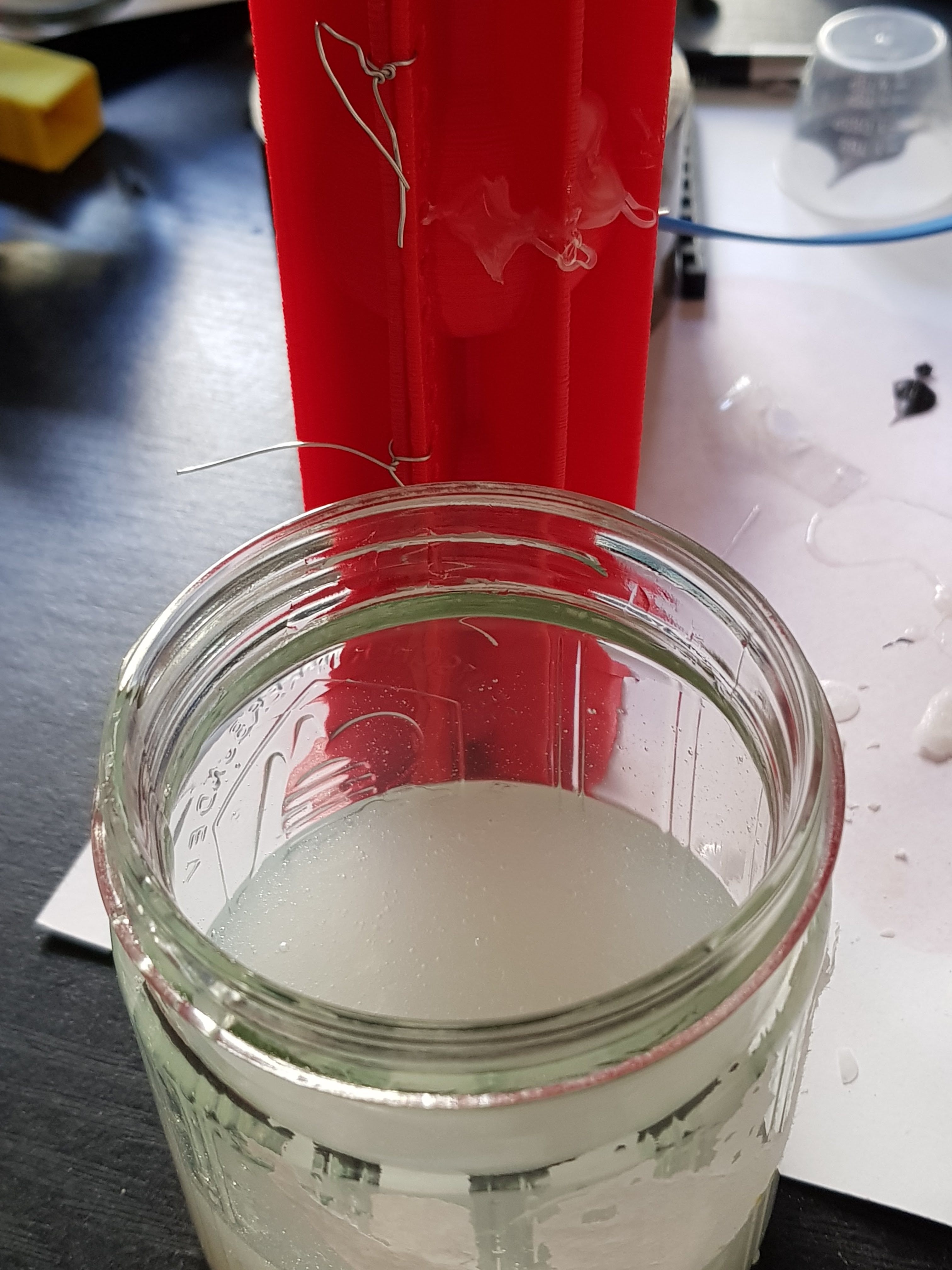
Step 7: Cast the silicone
Prepare the silicone as the producer recommends. It takes some time to pour the large amount of silicone into the narrow form. The silicone we use must be used within 10 minutes. So start at once after preparing the silicone.
Important: The USB micro connector, the switch and the ISP connector shouldn’t be dashed with silicone. If this happens remove the silicone. Maybe some silicone will remain behind. This can be removed later when the silicone is solid.
The battery is covered with silicone, the USB connecor and switch are not.
Step 8: Remove the form
Remove the tinker wire. Remove overhanging part of the silicone. Carefully tear both parts of the form away. You can use a knife, but be careful not to “hurt” the vibrator. Remove overhanging silicone at the vibrator. Also remove the two wedge like forms at both sides of the inlay.


Step 9: Install the closure
Now you can put the closure on the inlay. Fix the closure with glue. (Be careful! The USB connector is not very strong.) 


Tinker, share and download from Tinkercad:
form and inlay: https://tinkercad.com/things/b8nQxRn4XWl
closure: https://tinkercad.com/things/dhgtgeaYG0B
Download as zip-file: Fusion
Download at Thingiverse:
http://www.thingiverse.com/thing:1505539
USB powered charging station for the silicone molded vibrator
 We made a DIY silicone molded vibrator (see here, here and here) using the Arduino compatible body interaction vibrator development board and a wireless charging module. Now we need a charging station where you can put your vibrator for battery charging.
We made a DIY silicone molded vibrator (see here, here and here) using the Arduino compatible body interaction vibrator development board and a wireless charging module. Now we need a charging station where you can put your vibrator for battery charging.
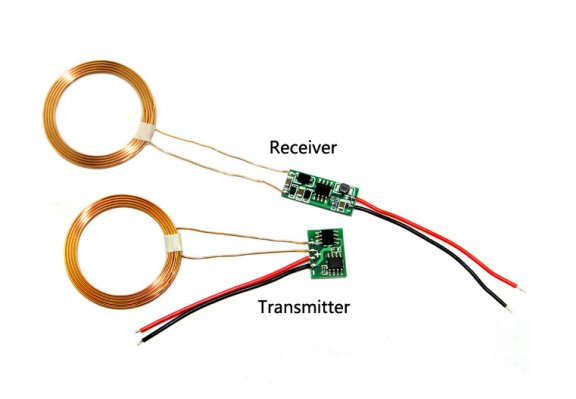
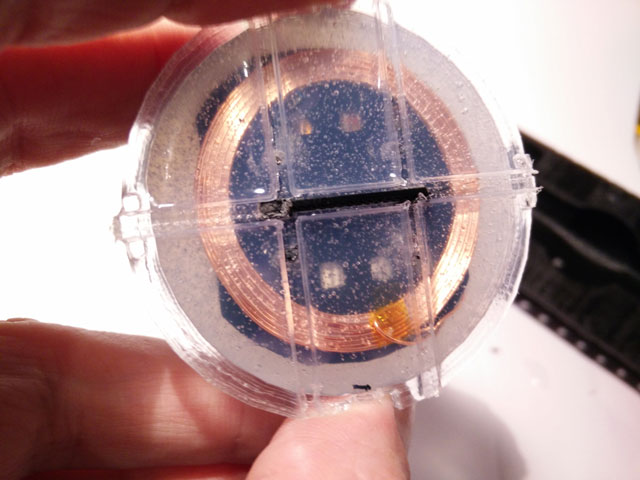
We need a simple box for the wireless charging sender (transmitter) module and the coil. In addition we need a USB cable which we will cut though and connect to the charging module.
It is important to keep the distance between sender and receiver coil as small as possible. The larger the distance is the less power will be transmitted. Therefore the plate where you put the vibrator must be very thin. There are different modules available.
What do you need?
- A USB cable
- Wireless charging sender (transmitter) eg. from Seeed Studio, 5V input. The sender (transmitter) will be placed in the charging station. The receiver module will be part of the vibrator. There are different modules available. Look for a 5V input module.

Instructions:
A. Print out part A and B. Download STL files (zip file)

B. Cut a USB cable. Plug the cable through the hole of form B.
C. Now connect the USB wires with the sender module. Solder the red wire to the (+) pad on the wireless charging sender. Solder the black wire to the (-) pad.

D. Glue the sender board on the bottom of the red form. Put some glue on the cable to fix it. We used hot glue.

E. Now glue the black form and the sender coil together. We used simple “UHU”-like glue. If the distance between coil and form is too large the charging could be rather slow. So don’t use too much glue.
F. Now put together both parts. Again we used a simple glue.

G. Insert the USB connector to your PC or any other source. Now the vibrator should be charged which is indicated by an orange LED.
 Ready! Have fun with your collection of wireless DIY Arduino-compatible vibrators.
Ready! Have fun with your collection of wireless DIY Arduino-compatible vibrators.
Download STL files (zip file)
All files at Thingiverse: http://www.thingiverse.com/thing:1488428
Tinker and share with Tinkercad:
New fusion 3d printed and silicone molded vibrator
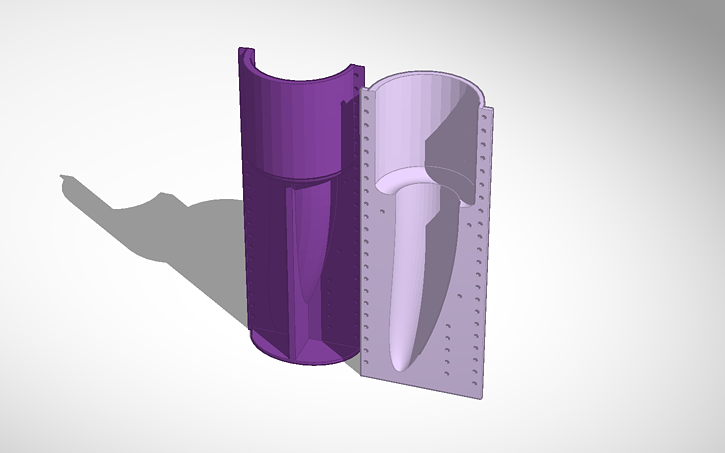
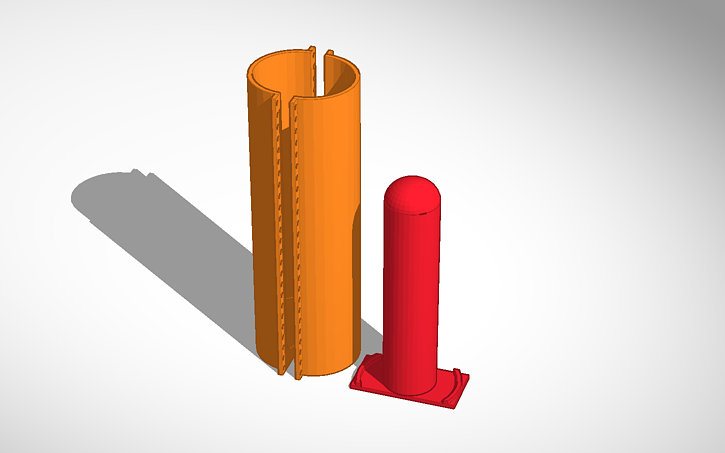
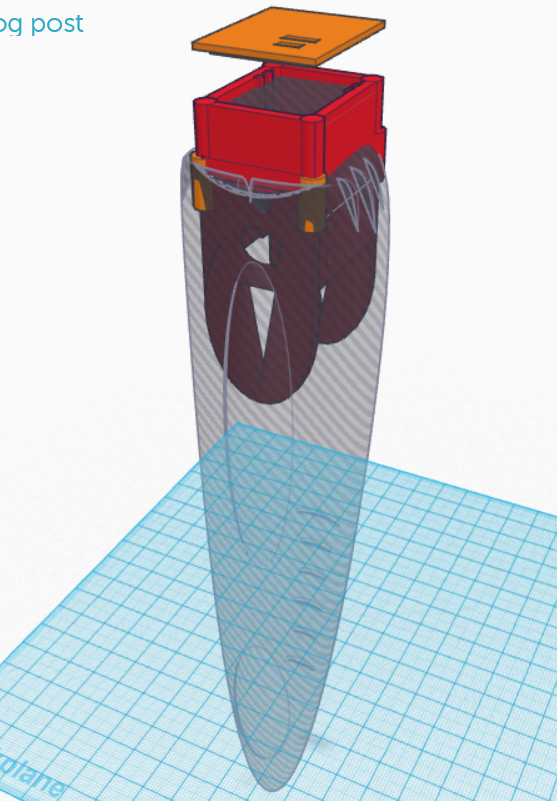 This is the initial design. The round curved form will be in silicone with vibration motor within (vibration motor not shown on sketch). The red part is 3d printed. It is the enclosure for the body interaction vibrator development board and LiPo battery. You can plug-in the Micro USB connector for battery charging. In addition there is an on/off switch e.g. for travelling.
This is the initial design. The round curved form will be in silicone with vibration motor within (vibration motor not shown on sketch). The red part is 3d printed. It is the enclosure for the body interaction vibrator development board and LiPo battery. You can plug-in the Micro USB connector for battery charging. In addition there is an on/off switch e.g. for travelling.
Silicone overmolded vibrator – balls revisited
Building your own silicone molded vibrator becomes now easier. We already have presented 3d printed forms for building your personal vibrator (massage wand, wireless charged vibrator). The vibrator uses the body interaction vibrator development board. The body interaction board has a Arduino compatible microcontroller, vibration strength control by motion, a vibration motor and a rechargeable battery.
 What is new? The electronics including battery are in the base of the vibrator. We developed a 3d printed enclosure for the electronics. This has several benefits: The assembling of the electronics and the molding itself is easier as everything is fixed within the enclosure. And it is more safe as the enclosure shields the electronics from the environment (and vice versa). In addition we used a different charging module from Seeed Studio. The input voltage is only 5V. Now you can connect the charging module with a USB connector and don’t need another power supply. (Look here for an explanation of wireless charging sender and receiver.)
What is new? The electronics including battery are in the base of the vibrator. We developed a 3d printed enclosure for the electronics. This has several benefits: The assembling of the electronics and the molding itself is easier as everything is fixed within the enclosure. And it is more safe as the enclosure shields the electronics from the environment (and vice versa). In addition we used a different charging module from Seeed Studio. The input voltage is only 5V. Now you can connect the charging module with a USB connector and don’t need another power supply. (Look here for an explanation of wireless charging sender and receiver.)

Another improvement is the placing of the vibration motor. The vibration motor can now be placed in the center of the vibrator and it different heights. Just were you need the power.
 Finally the mounting is improved. The mounting holds the enclosure when it is inserted into the form.
Finally the mounting is improved. The mounting holds the enclosure when it is inserted into the form.
The mounting (together with the enclosure with the electronics) is inserted into the form. The form consists of two parts which must be fastened together by tinker wire. It is a variation of the ball theme.
We present a step by step procedure for tinkering the vibrator. You need:
- 3d printed form (molding form, 2 parts)
- 3d printed enclosure
- 3d printed mounting
- body interaction vibrator development board
- silicone with a high shore A value (eg. shore A 45 which is quiet hard but still flexible), approx. 100 ml
- wireless charging module eg. from Seeed studio
- soldering station, (hot) glue
Step by step procedure:
A. Print out all forms. You can download the forms from Thingiverse.
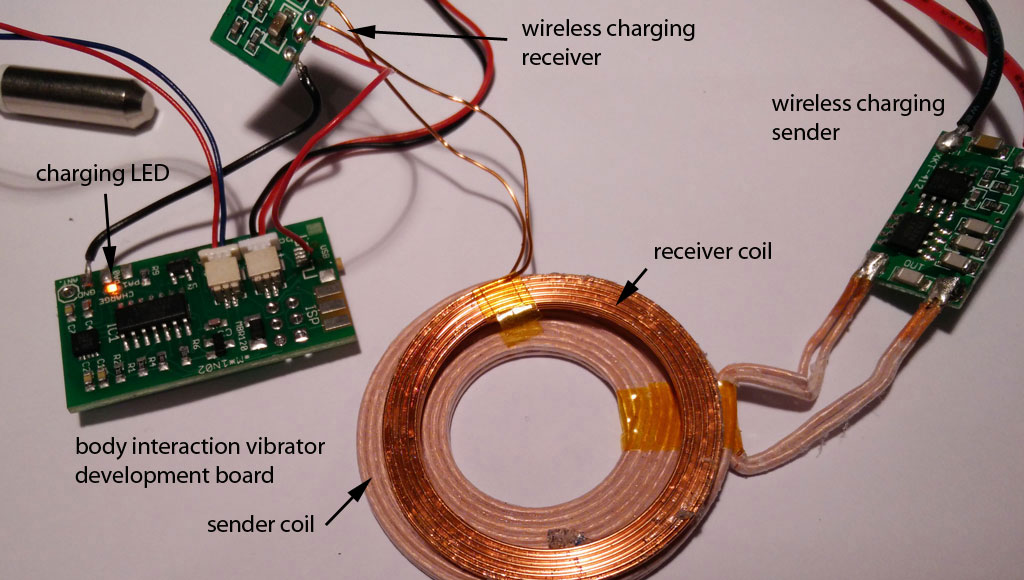
B. Connect the wireless charging module to the body interaction vibrator development board.
B.1 You have to solder a wire connecting (-) on the wireless charging module and GND on the body interaction board.
B.2 Now comes the tricky part. You have to connect (+) from the charging module with the body interaction board. Solder a wire at (+) of the charging module. But where do you solder the wire on the body interaction board? Unfortunately the wireless charging option was not taken into consideration during the development of the board. So there is no appropriate connection on the board.
 The best solution is to unsolder the USB connector and connect to + of the USB connection. The easiest way to unsolder the surface mounted USB connector is done with a hot air soldering station. Alternatively you can solder the wire directly to the MAX1555 module – this solution is presented here. In any case: Be careful not to break the tiny pads connecting pcb and USB connector.
The best solution is to unsolder the USB connector and connect to + of the USB connection. The easiest way to unsolder the surface mounted USB connector is done with a hot air soldering station. Alternatively you can solder the wire directly to the MAX1555 module – this solution is presented here. In any case: Be careful not to break the tiny pads connecting pcb and USB connector.
B.3 Connect the sender module with a 5V power supply. You can use a USB cable, dismantle the cable and connect the black and red wires.

C. Place the receiver charging coil on top of the enclosure. The diameter of the top side is a bit larger than the diameter of the bottom side. Use some glue to fix the coil. Don’t fix the mounting now. It is easier to do it later (step E).
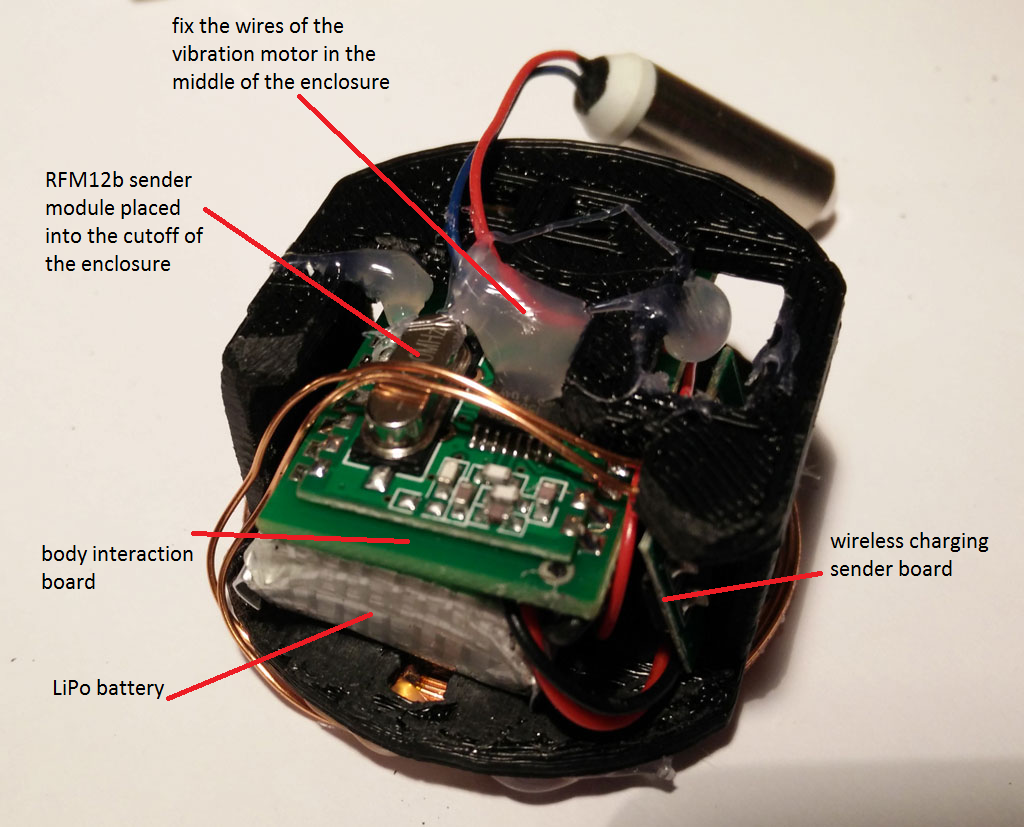
D. Put the electronics into the enclosure: Begin with the body interaction board. The RFM12b is quite large so place it at an outer position. Then insert carefully the LiPo battery. Don’t force it! The plugs for the battery and the motor could break. If you have done so insert the tiny wireless charging receiver board. At the end fix the wires of the vibration motor in the middle of the enclosure.
E. Connect the mounting with the enclosure. There are 2 holes provided where the mounting fits into the enclosure. Use some glue to stick together both parts. (see picture above step C).

F. Put together both parts of the molding form. Use tinkering wire to attach both parts tight together. Then insert the enclosure into the form. Check the wireless charging function. The yellow LED must be on when you place the charging coil over the receiver coil.

G. Now poor silicone into the molding. We use Shore A 45 silicone which is rather hard. The silicone has to dry for some hours or days. Read the instructions of your silicone provider.

H. When the silicone is hard, you can remove the tinkering wire. Then carefully remove the form.


I. Remove the overhang.
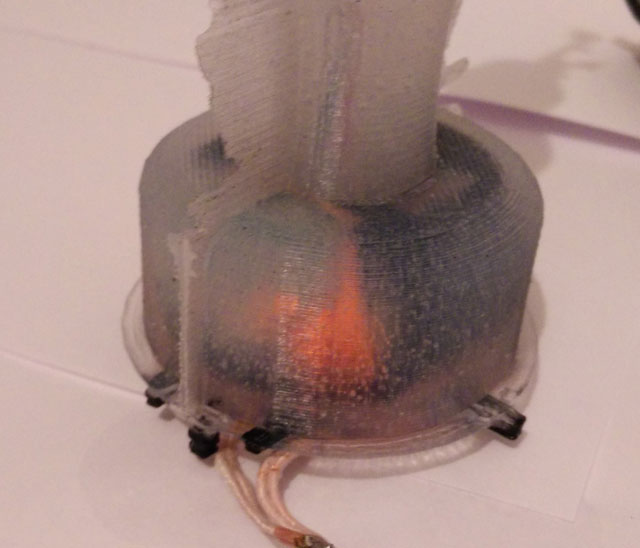
J. Test the wireless charging. The orange LED must be on when both coils are near together.

K. Remove the mounting.
Design your own forms using Tinkercad. Start now and share!
Old versions of the enclosure:Enclosure & mounting togther, Enclosure , Mounting
Download the STL files for 3d printing from Thingiverse.
Update 2016/03/12: Added image of circuits showing where to solder the wireless charging module.
Update 2016/04/05 redesign of mounting and enclosure due to different versions of the wireless charging receiver coil
